4. सुदूर संवेदन प्लेटफार्म
4. सुदूर संवेदन प्लेटफार्म
(Remote Sensing Platforms)
सुदूर संवेदन प्लेटफार्म
प्लेटफार्म का अर्थ है कि अन्तरिक्ष में ऐसा स्थान या स्थिति जहाँ पर कैमरा या संवेदक (Sensor) लगा हुआ होता है तथा जो लक्ष्य या घरातल के किसी भाग की सूचनाओं को प्राप्त करता है। सुदूर संवेदन में प्रयोग किये जाने वाले सभी गुब्बारों, हैलीकाप्टरों, वायुयानों, अन्तरिक्ष शटल, राकेटों तथा अन्तरिक्षयानों को सुदूर संवेदन का प्लेटफार्म कहा जा सकता है।
इनका उपयोग विभिन्न उद्देश्यों के आधार पर किया जाता है। सुदूर संवेदन के प्रोग्राम के उद्देश्य, संवेदक के प्रकार (Types of Sensor), प्रचालन उँचाई (Operating Height), पेलोड (Payload), प्रचालन परास (Operating Range), समय (Time), लागत (Cost) इत्यादि को ध्यान में रखकर किसी भी प्लेटफार्म का चयन किया जा सकता है।
प्लेटफार्म के प्रकार (Types of Platform)
पृथ्वी के धरातल से ऊँचाई के आधार पर सुदूर संवेदन प्लेटफार्म को निम्नलिखित तीन वर्गों में विभाजित किया जा सकता है।
1. भू-आधारित प्लेटफार्म (Ground Based Platform)
2. वायुमण्डल आधारित प्लेटफार्म (Air Based Platform)
3. अन्तरिक्ष आधारित प्लेटफार्म (Space Based Platform)
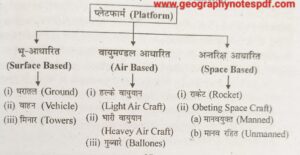
1. भू-आधारित प्लेटफार्म (Ground Based Platform):-
सुदूर संवेदन प्रणाली में धरातल पर आधारित प्लेटफार्म का उपयोग मुख्यतः धरातलीय संसाधनों के अध्ययन के लिये किया जाता है। भूमि सत्यापन द्वारा वास्तविक स्थिति से सम्बन्धित सूचनाओं को एकत्रित कर प्रयोगशाला में अध्ययन किया जाता है। इस प्लेटफार्म के अन्तर्गत अनुसंधानकर्ता स्वयं घटना स्थल पर जाकर पूर्व एकत्रित सूचनाओं का सत्यापन कर नई सूचनाओं को सम्मिलित करने के पश्चात किसी परिणाम या निष्कर्ष पर पहुँचता है।
भू-धरातल की वास्तविक सत्यता का अवलोकन एवं मापन कई प्रकार से जा किया सकता है। वायुमण्डल विज्ञान तथा जलवायु विज्ञान से सम्बन्धित घटनाओं को धरातल पर अवलोकन करना एक रोचक विषय है। इसका उपयोग तब और भी अधिक हो जाता है जब कई प्रकार की क्रियायें वायुमण्डल के 4 या 5 किलोमीटर की ऊँचाई तक घटित होती है। रडार, डॉपलर, लीडर, लघुतरंग रेडियोमीटर, डॉवसन, स्पेक्ट्रोमीटर इत्यादि कई स्थल आधारित सुदूर संवेदन के यंत्र हैं जिनका उपयोग मौसम एवं जलवायु विज्ञान की सूचनाओं को एकत्र करने के लिए किया जाता है।
2. वायुमण्डल आधारित प्लेटफार्म (Air Based Platform):-
वायुमण्डल आधारित प्लेटफार्म का प्रयोग मुख्यतः वायु फोटोचित्रों को खींचने के लिए किया जाता है। इसका उद्देश्य, फोटो-विश्लेषण (Photo Interpretation) तथा फोटोग्रामेट्रिक अध्ययन करना होता है । इनको प्राप्त करने के लिये वायुयानों पर क्रमवीक्षक (Scanner) लगे होते हैं। क्रमवीक्षक की उपयोगिता एवं कार्य के परख की जाँच, वायुयान एवं उपग्रह मिसन से पूर्व भलीभाँति की जाती है। उद्देश्य एवं उपयोगिता के आधार पर क्रमवीक्षक में भिन्नतायें होती हैं। वायुमण्डल आधारित प्लेटफार्म को पुनः दो उप वर्गों में विभाजित किया जा सकता है-
(i) गुब्बारा आधारित प्लेटफार्म (Balloon Based Plafform)
(ii) वायुयान निर्मित प्लेटफार्म (Aircraft Based Platform)
गुब्बारा आधारित प्लेटफार्म (Ballon Based Platform):-
सुदूर संवेदन उद्देश्य की पूर्ति के लिये गुब्बारों की उपयोगिता 1900 के बाद प्रारम्भ हुई थी। सर्वप्रथम पृथ्वी के धरातल के अध्ययन के लिये गुब्बारे विकसित किए गये थे। प्रारम्भ में गुब्बारों का उपयोग विभिन्न ऊँचाइयों पर संवेदक (Sensor) की उपयोगिता प्रमाणित करने के लिये किया गया था। मौसम विज्ञान में गुब्बारों का उपयोग हवा की गति को नापने के लिये किया गया था। आजकल मौसम सम्बन्धी वायुमण्डलीय दशाओं की जानकारी प्राप्त करने के लिये इन प्लेटफार्मों का काफी प्रयोग होता है। भिन्न-भिन्न आकार व आकृति के आधार पर गुब्बारा आधारित प्लेटफार्म को निम्नलिखित तीन प्रमुख वर्गों में विभाजित किया जा सकता है:-
(a) स्वतंत्र गुब्बारे (Free Balloons),
(b) बन्धन सूत्र गुल्बारे (Tithered Balloons) तथा
(c) शक्तियुक्त गुब्बारे (Powered Balloons)।
वायुयान आधारित प्लेटफार्म (Air Based Platform):-
विस्तृत धरातलीय दृश्य को देखने के लिये लगभग 20 मीटर की ऊंचाई से वायुयानों का उपयोग किया जाता है। हवाई सर्वेक्षण (Aerial Survey), यंत्रों के भार (Equipment Weight) तथा सर्वेक्षण लागत के आधार पर अलग-अलग प्रकार के वायु आधारित साधन प्रयोग किये जाते हैं। जैसे कि हैलीकॉप्टर, लघु वायुयान, इत्यादि जिन पर वायु कैमरे लगे रहते हैं। हवाई कैमरे अत्यधिक भारी होते हैं जो वायुयान के तल पर एक छिद्र पर जड़े होते हैं। अधिकतर वायुयान 8 किमी० से नीचे लेकिन धरातल से 500 मीटर की ऊँचाई से उड़ते हैं। प्रायः ये 150 किमी० प्रति घंटे की गति से उड़ते हैं।
हवाई कैमरे अत्यधिक नाजुक (Sophisticated) तथा खर्चीले होते हैं। अब धीरे-धीरे इनके भार (30 किलो) एवं खर्च को कम करने का प्रयास किया जा रहा है। हैलीकॉप्टर कम रफ्तार से कम ऊँचाई पर आसानी से उड़ सकता है जो अति उच्च विभेदन (Resolution) के विवरणों को प्राप्त करता है। सामान्यतः वायुयानों का प्रयोग सुदूर संवेदन के रूप में वायु फोटो चित्रों तथा क्रमवीक्षक (Scanner) बिम्बों को प्राप्त करने के लिए किया जाता है। वायुयान में कुछ सावधानी रखना अति आवश्यक है। वायुयान अत्यधिक स्थिर, कम्पन रहित तथा समान गति क्षमता रखने वाला होना चाहिए। ऊँचाई के आधार पर वायुयानों को वर्गीकृत किया जा सकता है। भारत में सुदूर संवेदन के उपयोग में लाये जाने वाले वायुयानों को निन्मलिखित वर्गों में बाँटा गया है-
वायुयानों के प्रकार
| वायुमान का नाम | ऊँचाई (मीटर) | न्यूनतम उड़ान गति (किमी प्रति घंटा) |
| डकोटा (Dakota) | 18000-20000 | 240 |
| एवरो (Avro) | 25000 | 600 |
| सेसना (Cessna) | 29000 | 350 |
| केनबरा (Canbera) | 45000 | 360 |
| U-2 | 21300 | 798 |
| रॉकवेल (Rockwell) | 108000 | 6620 |
परम्परागत वायुयान के अतिरिक्त हैलीकॉप्टर, ड्रोनें (Drones), डाईरीजीबल (Dirigible) तथा सेलप्लेन (Sailplane) का उपयोग भी सुदूर संवेदन के लिये किया जाता है। टेलीविजन तथा फोटोग्राफी (कम ऊंचाई से) में इनका विशेष प्रयोग होता है।
वायु-आधारित सुदूर संवेदन प्रणली के यन्त्र
भारत में वायुयान आधारित सुदूर संवेदन प्रणाली के निम्न यंत्र हैं जिनको सर्वहित सम्वन्धी उपयोगों में लाया जाता है।
(i) समुद्रीय रंगीन रेडियोमीटर (Ocean Colour Radiometer)
(ii) मॉड्लर बहु स्पेक्ट्रल क्रमवीक्षक (Modular Multispectural Scanner)
(iii) इसरो-एम. एस. एस. (ISRO MISS)
(iv) कैमरा (Camera)
कैमरा (Camera)-
लघु आकार की फोटोग्राफी के लिये विभिन्न प्रकार के वायु कैमरे प्रयोग में लाये जाते हैं। विभिन्न ऊंचाइयों से प्राप्त वायव चित्रों को स्टीरियो मॉडल पर देखा जा सकता है। दृश्य प्रभाग (Visible) तथा अवरक्त (Infrared) स्पैक्ट्रम बैंड के अन्तर्गत विभिन्न फिल्टर तथा फिल्मों का उपयोग वायु फोटोग्राफी के लिये किया जाता है। अवरक्त (Infrared) श्याम और श्वेत रंग की फिल्में, रंगीन एवं श्याम श्वेत फोटोग्राफी के लिये की जाती है। इस प्रकार के फोटोचित्रों को देखकर विश्लेषण किया जा सकता है। वायु फोटोग्राफी के लिये निम्न प्रकार के कैमरों का उपयोग किया जाता है:-
(i) हैसलब्लेड- 70 मिलीमीटर फिल्म (श्याम व श्वेत एवं रंगीन)
(ii) निकोन, कैमरा इत्यादि- 35 मिलीमीटर फिल्म
(iii) मैट्रिक कैमरा- 9 इंच फिल्म (श्याम व श्वेत, रंगीन, अवरक्त इत्यादि)
हवाई सर्वेक्षण मिशन (Aerial Survey Mission):-
यहाँ पर मिशन से अभिप्राय हवाई सर्वेक्षण कार्य को सम्पन्न कराने से है। आधुनिक वायुजन्मित संवेदक प्रणाली में उच्च भेदन के जी. पी. एस. रिसीवर लगे होते हैं तथा कुछ पर आई.एम.यू. (I.M.U.)। जी.पी.ए. का उपयोग नौकायन एवं संवेदक की स्थिति निर्धारण के लिये किया जाता है। सर्वेक्षण कार्य कैमरे के उदभासन स्टेशन के लिये तथा किसी आकृति के विम्ब की धरातल पर जानने लिये निर्देशांकों की आवश्यकता होती है। इस कार्य के लिये वायुयान के 30 किमी० के दाररे में जी.पी.एस. स्टेशन के सन्दर्भ की आवश्यकता होती है।
IMU (Inertial Measuring Unit) के दो प्रमुख लाभ हैं-
(i) IMU द्वारा दी गई गणना का उपयोग, जी.पी.एस. द्वारा लिये गये निर्देशांकों में सुधार के लिये किया जा सकता है।
(ii) IMU संवेदक का कोण नापने में सहायक होता है।
IMU पर घूर्णादर्शी (Gyro) तथा गति या वेग बढ़ाने वाला मीटर जुड़ा होता है। यह एक नाजुक, भारी तथा महंगा यंत्र है। इसे प्रत्यक्ष संवेदक दिगविन्यास (Direct Sensor Orientation) कहते हैं जिसके द्वारा संवेदक की स्थिति तथा रुख ज्ञात किया जा सकता है। GPS तथा IMU, निर्धारण स्थिति (Position) तथा दिगविन्यास प्रणाली के लिये अति आवश्यक हैं। इनके द्वारा अप्रत्यक्ष रूप से भूसन्दर्भित (Georeperencing) किया जा सकता है।
प्रायः यह देखा गया है कि मिशन योजना (Mission Planning) तथा इसका सम्पादन किसी व्यापारिक सर्वेक्षण कम्पनी या वृहत राष्ट्रीय संस्था या सेना द्वारा किया जाता है।
वायु आधारित प्लेटफार्म के लाभ (Advantages of Aricraft Platforms)
वायु आधारित प्लेटफार्म के निम्न लाभ हैं-
1. उच्च विभेदन (High Resolution):-
वायुयान आधारित सर्वेक्षणों में प्राप्त विभेदन (Resolution) उपग्रहों से प्राप्त विभेदन की तुलना में अधिक होता है। स्थानीय विभेदन (Spatial Resolution) की दृष्टि से उच्च स्तरीय फोटोचित्रों की प्राप्ति होती है।
2. विभिन्न मापनियों के बिम्ब (Images of Different Scale):-
चूँकि ऊँचाई पर वायुयान की उड़ान चालक अथवा प्रयोग करने वाले की इच्छा पर निर्भर है। इसलिये ऊँचाई के अनुसार अलग-अलग मापनियों पर आधारित वायुफोटो चित्रों को प्राप्त किया जा सकता है। विभेदन (Rsolution) की क्षमता के आधार पर इनका अलग-अलग उपयोग किया जाता है।
3. सूक्ष्म सर्वेक्षण (Micro Survey):-
उच्च विभेदन (Resolution) तथा वृहत् मापनी (Large Scale) पर बने वायु फोटो चित्रों का सूक्ष्म तथा सामरिक सर्वेक्षणों में उपयोग किया जाता है। स्टीरियोमॉडल में देखने से इनकी उपयोगिता और भी बढ़ जाती है। समस्या मूलक अध्ययनों, सूक्ष्म सर्वेक्षणों तथा क्षेत्रीय योजनाओं के लिये वृहत् मापनी पर बने फोटोग्राफ का उपयोग किया जाता है।
4. पुनरावृत उड़ानें (Repetitive Flights):-
पुनरावृत्ति उड़ानों के द्वारा दृश्य-क्षेत्र के अल्पकालीन परिवर्तिनों को समझने की सुविधा होती है।
5. दूर-दराज क्षेत्रों का सर्वेक्षण (Remote Arca Survey):-
दूर-दराज के दुर्गम पर्वतीय, वन व मरुस्थलीय क्षेत्रों के सर्वेक्षण की सरलता पुनरावृत्तिक उड़ानों के द्वारा सम्पन्न की जाती है।
3. अन्तरिक्ष आधारित प्लेटफार्म (Space Based Plateform):-
अन्तरिक्ष आधारित प्लेटफार्म वायुमण्डल के प्रभाव से अछूते रहते हैं। इस प्रकार के प्लेटफार्म पृथ्वी के चारों ओर ध्रुवीय कक्ष में स्वतंत्र रूप से घूमते हैं तथा एक निश्चित अन्तराल पर सम्पूर्ण पृथ्वी या पृथ्वी के किसी भाग को तय करते हैं। भूभाग को तय करना उपग्रह के मार्ग कक्ष पर निर्भर करता है। अन्तरिक्ष आधारित प्लेटफार्म के कारण ही हम असाधारण मात्रा से सुदूर संवेदन आँकड़ों को प्राप्त करते हैं। यही कारण है कि सुदूर संवेदन अन्तराष्ट्रीय स्तर पर बहुत लोकप्रिय हुआ है।
उपग्रह मिशन (Satellite Mission):-
उपग्रह के संवेदक द्वारा नियमित रूप से रिकॉर्ड करने की क्षमता का निर्धारण गहन रूप में किया जाता है। यह उपग्रह परिक्रमा पथ (Orbit) के प्राचलों (Parameter) की विशेषताओं पर निर्भर करता है।
परिक्रमा पथ (Orbit):-
जिस पथ से होकर उपग्रह पृथ्वी का चक्कर लगाता है उसे परिक्रमा पथ कहा जाता है। यह गोल या गोलाकार होता है। अलग-अलग उद्देश्यों के लिये अलग-अलग प्रकार के परिक्रमा पथ अपनाये जाते हैं। उद्देश्यों के आधार पर परिक्रमा पथ की विशेषतायें निम्न प्रकार से हैं-
(i) कक्षीय पथ की ऊँचाई (Orbital Attitude):-
पृथ्वी के धरातल से उपग्रह के मध्य की दूरी (किमी०) को परिक्रमा पथ की ऊँचाई कहते हैं। पथ की ऊँचाई धरातल के दृश्य विस्तार (Coverage) एवं विभेदन (Resolution) को प्रभावित करता है। यदि उपग्रह पथ की ऊँचाई अधिक होगी तो धरातलीय विस्तार अधिक होगा लेकिन धरातलीय विभेदन कम होगा। इसके विपरीत कम ऊँचाई पथ पर धरातलीय विस्तार कम होगा लेकिन विभेदन (Resolution) अधिक होगा।
(ii) कक्षीय पथ का झुकाव कोण (Orbital Inclination Angle):-
कक्षीय तल एवं भूमध्य रेखीय तल के मध्य के कोण को कक्षीय पथ का झुकाव कोण कहते हैं। झुकाव कोण, किसी आक्षांश रेखा पर संवेदक द्वारा देखे गये धरातलीय विस्तार (Field of View) को निर्धारित करता है। उदाहरण के लिये यदि उपग्रह पथ का झुकाव कोण 60° है तो यह पृथ्वी के धरातल पर 60° उ० तथा 60° द० के मध्य ही परिक्रमा करेगा। यदि कक्षीय पथ का कोण 60° से कम होगा तब यह धरातल के कम भाग को कवर करेगा। ध्रुवीय क्षेत्रों का अवलोकन इसके द्वारा नहीं हो सकेगा।
(iii) कक्षीय काल (Orbital Period):-
कक्षीय काल से अभिप्राय यह है कि कोई उपग्रह पृथ्वी का एक चक्कर कितने समय में पूरा कर लेता है। उदाहरण के लिये यदि कोई ध्रुवकक्षीय उपग्रह 806 किमी० की ऊँचाई पर स्थिति है जो इसका कक्षीय भ्रमण काल 101 मिनट का होगा। चन्द्रमा का कक्षीय काल 27.3 दिन है। उपग्रह की गति का प्रभाव, प्राप्त की जा सकने वाली इमेज के प्रकारों पर परिलक्षित होता है।
(iv) पुनरावृत्ति चक्र (Repeat Cycle):-
पुनरावृतिक चक्र दो क्रमिक काल के मध्य का समय है । पुनरावलोकन काल से अभिप्राय यह है कि एक ही स्थान की अलग-अलग दो दिनों में ली गई इमेज है। इसका निर्धारण उपग्रह संवेदक की Pointing Capability पर निर्भर करता है। Pointing क्षमता यह दर्शाता है कि कोई भी उपग्रह केवल नीचे के अलावा दाँये-बाँये, ऊपर-नीचे कितना घूम सकता है। आधुनिक उपग्रहों में इस प्रकार की क्षमतायें विकसित की गई हैं। यदि इस प्रकार की क्षमता उपग्रह संवेदक में हो तो पुनरावृत्ति काल कम-ज्यादा किया जा सकता है।
कृत्रिम उपग्रह (Artificial Satellites):-
अंतरिक्ष आधारित प्लेटफार्म के कृत्रिक उपग्रह सुदूर संवेदन का प्रमुख प्लेटफार्म है तो वायुमण्डल की दशाओं एवं भू-संसाधनों का ग्लोबीय स्तर पर लगातार प्रेक्षण एवं प्रबोधन (Monitor) करता है। पृथ्वी के गुरुत्वबल से बचने के लिये इन्हें 600 किमी० से अधिक ऊँचाई पर अलग-अलग कक्षों में निर्धारित किया जाता है। किसी उपग्रह की ऊँचाई, वेग तथा परिक्रमणकाल में परस्पर गहरा सम्बन्ध होता है तथा इन्हें उपग्रह छोड़ने से पूर्व निर्धारित किया जाता है। प्रत्येक उपग्रह का एक ग्रहपथ होता है जिसमें वह गति करता है। इसकी कक्षा (Orbit) पूर्व में ही निर्धारित की जाती है। सुदूर संवेदन मिशन में ग्रह पथ के आधार पर उपग्रहों के निम्नलिखित कक्षीय प्रकार प्रमुख है-
1. ध्रुव कक्षीय उपग्रह (Polar Orbit Satellite)
2. सूर्य तुल्यकालिक कक्षीय उपग्रह (Sun-syanchronous Orbit Satellite)
3. भू-स्थैतिक कक्षीय उपग्रह (Geostationary Orbit Satellite)
प्रश्न प्रारूप
प्रश्न 1. प्लेटफार्म से क्या तात्पर्य है? इसके प्रकार की विवेचना करें।
(What do you mean by Platform? Discuss its types.)
Read More:
- 1. सुदूर संवेदन और भौगोलिक सूचना तंत्र
- 2. उपग्रहों के विकास के इतिहास / The Historical Development of Satellite
- 3. भूगोल में सुदूर संवेदन के महत्व एवं उपयोगिता / The Significance and Utility of Remote Sensing in Geography
- 4. सुदूर संवेदन प्लेटफार्म
- 5. भू-स्थैतिक उपग्रह, सूर्य तुल्यकालिक उपग्रह एवं ध्रुव कक्षीय उपग्रह
- 6. लैण्डसेट उपग्रह
- 7. भारतीय सुदूर संवेदन उपग्रह
- 8. The Aerial Photography (वायु फोटोग्राफी)
- 9. The Digital Image (डिजिटल इमेज)
- 10. Projection / प्रक्षेप
- 11. अंकीय उच्चता मॉडल
- 12. जी. आई. एस. की संकल्पनाओं एवं उपागम
- 13. भौगोलिक सूचना प्रणाली के उद्देश्यों, स्वरूपों एवं तत्वों की विवेचना
- 14. भू-सन्दर्भ / The Geo-Referencing System
- 15. डिजिटल मानचित्रकला
- 16. रास्टर एवं विक्टर मॉडल में अंतर
- 17. The application of G.P.S. (जी.पी.एस. के उपयोग)
- 18. सुदूर संवेदन के उपयोग
- 19. Classification of Aerial Photograps (वायु फोटोचित्रों का वर्गीकरण)
